|
This is some of the hardware I currently build and use. Most of it revolves around robotic arms. The latest finished development is CHORG II robotic arm prototype, which will be followed soon by a third version. I build these prototypes in order to test and demonstrate some ideas I have and also as platform for the development of the adaptive control software due to be released soon. |
| CH.ORG II | |||||||||||||||||||
|
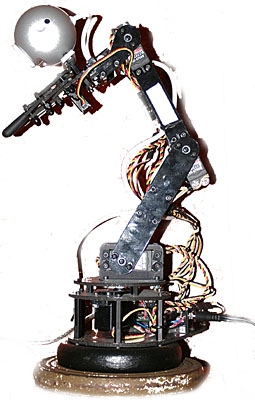
This is the second robotic arm prototype. It's fully equipped with three touch sensors, one slip sensor, a camera and a microphone. It has ten servo motors, six to control the arm and four to control the gripper. All ten servos are digital with metal/titanium gear. The arm's length, from shoulder to the gripper's centre, is about 18 inches or 52 centimetres. It's capable of lifting about 1kg. I had to add four heat sinks to dissipate the heat from servos and also add a system of springs, at the shoulder and elbow level to compensate for the arms weight. The base support is of massive iron and it weights 10kg - I had to add this in order to compensate for inertia created by fast movements of the arm. And also had to add rubber mounts at key points to damped/absorb the vibrations. There are some twenty one cables running down the arm segments, which was quite a challenge to fit through a tube with an inner diameter of only 10mm. At the joints cables will run though flexible cable guides. All joints run on ball bearings, including the gripper's four segments. At the base, the shoulder is supported by a heavy duty, high precision four bolt flange bearing. The robot uses two different power supplies, one for the electronics and the other (high amperage) for the servos. The servomotors will eat something like 240Watt/h under load. I had to use a separate high power wiring for them. |

|
||||||||||||
| The slip sensor is probably the most innovating future of this prototype. I built it from off shelf components worth some 10 dollars. It's precision is under millimetre on both xy axis and numerous test I've made prove that it works with any kind of material. It's also tolerant to the gripping pressure applied. The sensor will fit on a human finger size, it only measures 12mm by 22mm. The camera I use is a common Logitech webcam with some minor wiring modification. I intended to use a digital camera with a fast auto-focus function but I could not find a work around these limitation introduced by the manufacturer. Perhaps this future will be added to the next prototype. Right now I am gathering materials to create an improved , third version, of a prototype with some structural and wiring improvements. | |||||||||||||
CHORG II at work - click on the icons for full size. | |||||||||||||
|
|||||||||||||
CH.ORG I
|
This is my first robotic arm used for the CH.ORG project.
It's based on a lynx kit with some modifications, an added camera, three touch sensors
and a servio controller. I used this for the first time as testing ground for my adaptive software development. However, even do my software doesn't rely on the hardware (mechanical) precision, I had to move on creating a new platform (CH.ORG II) which will improve on vibrations and provide me with more degrees of freedom. Regardless, this hardware simplicity and imprecision, as proof of concept I managed to demonstrate that it's capable of successfully testing POS devices (electronic terminals) and execute complex operations using the sensors/camera feedback and the adaptive platform I developed. The price to put together such platform is fairly accessible to most people and it can prove quite useful for your project. |
|