
This is the robotic arm prototype I built as a test platform
click on the picture for more details
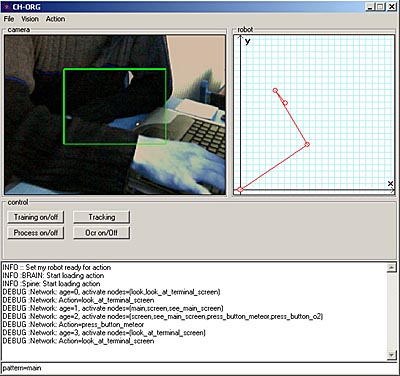
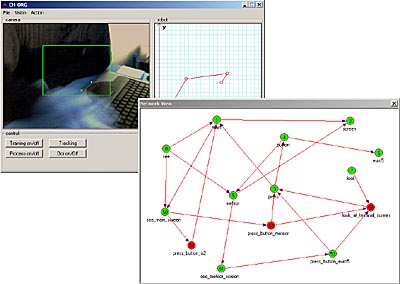
CHORG software interface in the first stages of development.
|
This software is currently under development soon to
be released. It's written in c++ implemented with wxwidgets,
which gives you the possibility to be easily ported on various platform (macos,
linux, etc). The engine behind it is based on real time image processing using
as a base OpenCv complemented by adaptive interpolation with neural networks
and evolutionary genetic algorithms. The main futures of this version future are: |
This is the robotic arm prototype I built as a test platform click on the picture for more details |
|
Currently, I am working to finish and release a beta version - unfortunately it took
me more then expected due to high complexity. Details about the hardware platform (robotic arm) I used to develop and test this can be found here.
|
|
|
CHORG software interface in the first stages of development. |
|
|
|
|