The hardware was developed to provide me with a decent amount of sensorial feedback and degrees of freedom/mobility. I recently finished the second version with soon to move to a third version, which will bring in additional sensorial structural and improvements. The software, currently under development soon to be released in beta version, gives you the ability to input a task structured lexically. It will also allow you to train various parameters involved in that task, such as object recognition and sensor calibration and gives you the ability to define your own robot configuration - all components being modularly coded. More details about the software platform can be found here.
Good results have been achieved as far in testing pos electronic terminals in which the task involved both the visual feedback (ocr, object recognition) and the adaptability to counteract hardware errors.

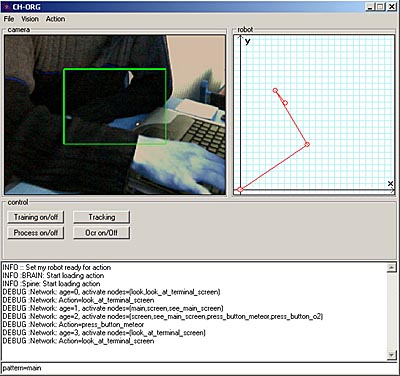
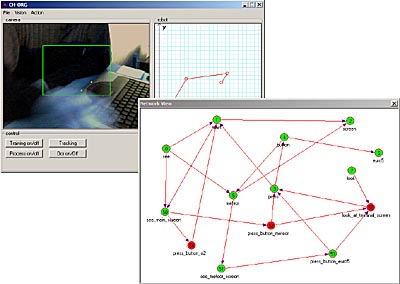
CHORG software interface in the first stages of development.